










ROSI CHALLENGE
O ROSI (RObô para Serviços de Inspeção) é um dispositivo robótico da VALE para inspecionar Transportadores de Correia. O nome é uma homenagem a Rosimar Cucco, primeira mantenedora a trabalhar no Porto de Tubarão da VALE, em Vitória-ES.
Os Transportadores de Correia são estruturas que podem chegar a quilômetros de extensão; no caso da Vale, estas são responsáveis pelo transporte diário de milhares de toneladas de minério. Realizada majoritariamente por operadores, a inspeção de suas condições é dificultada devido a sua grande extensão e riscos envolvidos durante a tarefa. Sendo assim, o ROSI tem como objetivo permitir aos operadores gerenciar seguramente a inspeção a distância, além de aumentar a eficiência das análises estruturais por permitir a coleta de dados de forma padronizada.
O ROSI é uma plataforma robótica inovadora no setor industrial e você pode participar disto! Convidamos os interessados a participarem do ROSI CHALLENGE, um desafio para acelerar o desenvolvimento de algoritmos autônomos para a inspeção industrial de Transportadores de Correia. Todos os algoritmos desenvolvidos para o evento serão de código aberto e disponibilizados no Github, contribuindo assim para a comunidade de robótica.

Confira as equipes homologadas para participar do desafio
| ROSI Challenge - Inscrições Homologadas | |||
|---|---|---|---|
| Nome da Equipe | Orientador(a) | Instituição orientador(a) | Capitão(ã) |
| Pyneapple | Raimundo Corrêa de Oliveira | Universidade do Estado do Amazonas - UEA | Jean Phelipe de Oliveira Lima |
| Hofs | Gustavo Hofstatter | ||
| ForROS | Raphaell Maciel de Sousa | ||
| AAI Robotics | Arthur Henrique Dias Nunes | ||
| Mind the GAP - ROSI | Gabriel Carvalho Garcia | ||
| Jabuti-cabas | Matheus Fellype Ferraz | ||
| The ROSers | Wolmar Araujo Neto | Universidade Federal de Ouro Preto - UFOP | Luan Fernandes Santos |
| LRM | Fernando Santos Osório | USP São Carlos - ICMC | Diego Renan Bruno |
| Bahia Robotic Team | Robson Marinho da Silva | Universidade do Estado da Bahia - UNEB | Gabriel Mascarenhas Costa de Sousa |
| Titãs da Robótica | Giovany Frossard Teixeira | Instituto Federal do Espírito Santo - IFES | Jean Pandolfi |
| Time_Ifes_Vitória | Douglas Almonfrey | Instituto Federal do Espírito Santo - IFES | Antônio Victor Machado de Oliveira |
| La5 | Selmo Eduardo Rodrigues Júnior | Instituto Federal do Maranhão - IFMA | Gerliane da Silva Chaves |
| Roots | Rafael Clemente Murakami | ||
| PPGEAS - UFSC | Danilo Giacomin Schneider | ||
| FAESA Robots | Victor Marques Miranda | Centro Universitário FAESA Vitória | Wesley Marques Pizetta |
| GPECA | Geronimo Barbosa Alexandre | Instituto Federal de Pernambuco - IFPE | Adônis França Belo |
| BlueThunder | Victor Bruno A. R. de Queiroz | Faculdade do Centro Leste - UCL | Danilo Marzola Cunha |
| Codaaut_Rosi | Silvia Grasiella Moreira Almeida | Instituto Federal de Minas Gerais - IFMG | Letícia Aparecida de Figueiredo |
| Taura Bots | Daniel Fernando Tello Gamarra | Universidade Federal de Santa Maria - UFSM | Álisson Henrique Kolling |
| Equipe Tubarão | Cassius Zanetti Resende | Instituto Federal do Espírito Santo - IFES | Paulo Jose de Almeida Barbosa |
| Team-Eletrica | João Victor Marçal Bragança | ||
| Pra VALÊ | Fernando Santos Osório | USP São Carlos - ICMC | Vinícius Ribeiro da Silva |
| LISHA Joinville | Gian Ricardo Berkenbrock | Universidade Federal de Santa Catarina - UFSC | André Luigi Bonote |
| L0velace | Erivelton Geraldo Nepomuceno | Universidade Federal de São João del-Rei - UFSJ | Helena Celestino Maia |
| ERUS 1 | Pedro Fontes Lelis | ||
| ERUS 2 | Mayke Wallace Silva Alves | ||
| BIR Team | Oberdan Rocha Pinheiro | SENAI Cimatec | Kaike Wesley Reis |
Em termos práticos, o desafio acontece em ambiente simulado. Os códigos devem ser implementados em ROS (Robot Operating System, Versão >= Kinetic), comunicando com o simulador V-REP através da interface vrep_ros_interface. O objetivo é programar o robô para realizar tarefas rotineiras de inspeção de forma autônoma.
O dispositivo conta com um Velodyne de 16 feixes, Kinect, IMU, GPS e encoders para o sensoriamento. Como atuação, é possível acionar a tração do veículo, seus braços de alavanca e as juntas do manipulador antropomórfico embarcado. Na flange do manipulador há a representação dos sensores (bloco em vermelho) que fazem a coleta dos dados para a inspeção do Transportador de Correia. As tarefas específicas que serão requisitadas para o desafio serão reveladas no regulamento, a ser disponibilizado em breve.
A etapa final ocorrerá no dia 28 de outubro durante o SBAI.
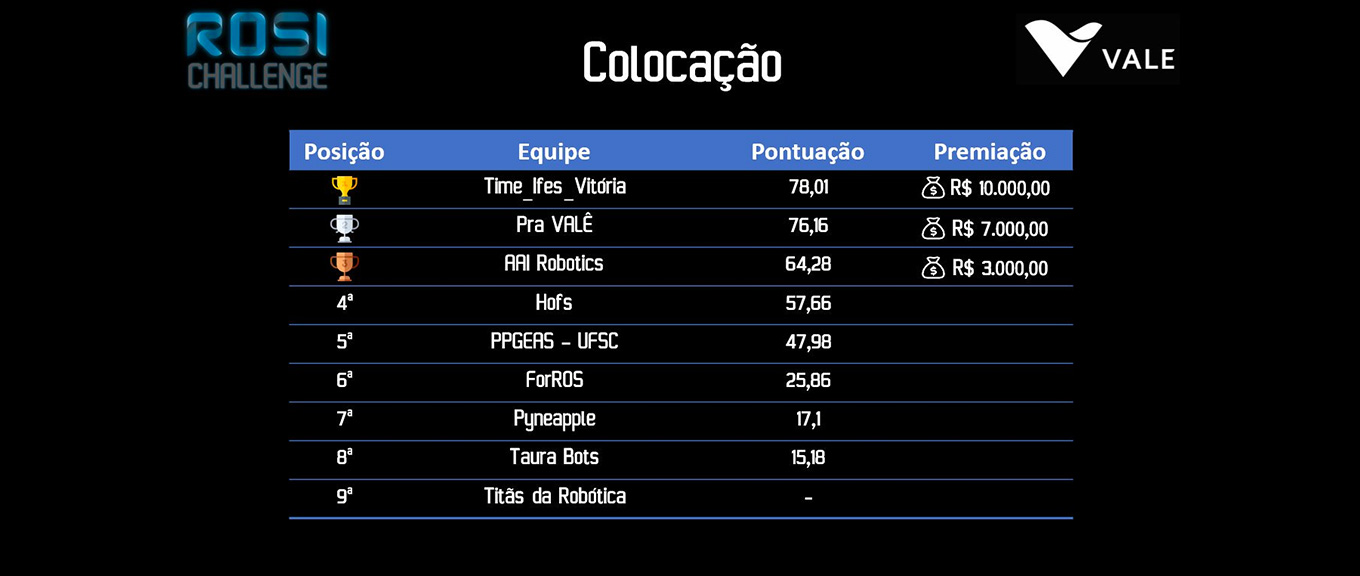
Serão oferecidos prêmios no formato de brindes com valor total de acordo com a classificação:
1º lugar: R$ 10.000,00 em prêmios;
2º lugar: R$ 7.000,00 em prêmios;
3° lugar: R$ 3.000,00 em prêmios.
Não há taxa de inscrição. Também não será exigida a presença das equipes em nenhuma etapa, podendo então participarem remotamente de todo o desafio.
“Inscrições encerradas”
O simulador, regulamento e códigos de exemplo já estão disponíveis no repositório: https://github.com/filRocha/rosiChallenge-sbai2019.
A organização reserva-se o direito de alterar quaisquer pontos do desafio ROSI CHALLENGE sem aviso prévio.
As notícias oficiais do desafio serão publicadas oficialmente na conta @rosichallenge do Twitter: https://twitter.com/rosichallenge
Quaisquer dúvidas, sugestões ou comentários, entre em contato no: rosichallenge@gmail.com.
Boa sorte!
REALIZAÇÃO:


PROMOÇÃO:

PATROCÍNIO:


APOIO:





ORGANIZAÇÃO:

14° Simpósio Brasileiro de Automação Inteligente - SBAI 2019
Parque Metalúrgico
Centro Convenções - UFOP
Centro Histórico
Ouro Preto - MG
(51) 3388-4944
contato@sbai2019.com.br